လျှပ်စစ်နှင့် လေဖိအားသုံး actuators များပိုက်လိုင်းအဆို့ရှင်များအတွက်- actuator အမျိုးအစားနှစ်မျိုးသည် အတော်လေးကွဲပြားပုံရပြီး တပ်ဆင်မှုနေရာတွင် ရရှိနိုင်သော ပါဝါအရင်းအမြစ်ပေါ် မူတည်၍ ရွေးချယ်ရန် လိုအပ်ပါသည်။ သို့သော် အမှန်တကယ်တွင် ဤအမြင်သည် ဘက်လိုက်မှုရှိပါသည်။ အဓိကနှင့် ထင်ရှားသော ကွာခြားချက်များအပြင်၊ ၎င်းတို့တွင် သိပ်မသိသာသော ထူးခြားသော အင်္ဂါရပ်များစွာလည်း ရှိပါသည်။
အလိုအလျောက်စနစ်များတွင် အသုံးအများဆုံး မောင်းနှင်ယန္တရားနှစ်ခုမှာ လျှပ်စစ်နှင့် လေဖိအားသုံး actuator များဖြစ်သည်။ ပုံမှန်အားဖြင့် actuator ရွေးချယ်မှုဆုံးဖြတ်ချက်ကို အခြေခံဒီဇိုင်းအဆင့်တွင် ပြုလုပ်ပြီး တပ်ဆင်ပြီးနောက် သက်တမ်းကုန်ဆုံးသည်အထိ အသုံးပြုမည်ဖြစ်သည်။
actuator ၏ ပါဝါအမျိုးအစားကို ရွေးချယ်သောအခါ၊ လူများသည် ပိုက်လိုင်းအတွင်းရှိ လုပ်ငန်းစဉ်အလတ်စား၏ ကန့်သတ်ချက်များကို ထည့်သွင်းစဉ်းစားလေ့မရှိဘဲ၊ ဒီဇိုင်နာ၏ အတွင်းပိုင်းရည်ညွှန်းပစ္စည်းများ၊ ပါဝါထောက်ပံ့မှုအခြေအနေ သို့မဟုတ် ထိုနေရာသည် ကြိုတင်ပြင်ဆင်ထားသော ဓာတ်ငွေ့အမြောက်အမြားကို ထောက်ပံ့ပေးနိုင်ခြင်းရှိမရှိကိုသာ အာရုံစိုက်ကြသည်။
သို့သော်၊ လည်ပတ်နေစဉ်အတွင်း၊ အချို့သောအဆို့ရှင်များတွင် actuator များတပ်ဆင်ထားရန် လိုအပ်ကြောင်း မကြာခဏတွေ့ရှိရပြီး၊ သို့မဟုတ်ပါက အချို့သောအဆို့ရှင်များရှိ လုပ်ငန်းစဉ်အလတ်စား၏ parameter များပြောင်းလဲသွားမည်ဖြစ်သည်။ ထို့နောက် မေးခွန်းပေါ်ပေါက်လာသည်- စွမ်းဆောင်ရည်တိုးတက်စေရန် မူရင်း actuator ကို သိမ်းဆည်းထားသင့်သလား သို့မဟုတ် အခြား actuator တစ်ခုဖြင့် အစားထိုးသင့်သလား။
ဝန်ဆောင်မှုသက်တမ်း ပိုရှည်သည်
ဤဆောင်းပါးသည် လျှပ်စစ်နှင့် လေဖိအား actuator များ၏ အဓိကစွမ်းဆောင်ရည် ဝိသေသလက္ခဏာများကို မိတ်ဆက်ပေးပြီး နှိုင်းယှဉ်ပါမည်။
ပုံမှန်အခြေအနေများတွင် ထုတ်လုပ်သူများသည် လျှပ်စစ် actuator များအတွက် လည်ပတ်မှု လည်ပတ်မှု အကြိမ်ရေ ၁၀,၀၀၀ နှင့် လေဖိအား actuator များအတွက် လည်ပတ်မှု လည်ပတ်မှု အကြိမ်ရေ ၁၀၀,၀၀၀ အာမခံပါသည်။ ထင်ရှားသည်မှာ လည်ပတ်မှု လည်ပတ်မှု အကြိမ်ရေအရ လေဖိအား actuator သည် ၎င်း၏ ရိုးရှင်းသော ဖွဲ့စည်းပုံကြောင့် သက်တမ်းပိုရှည်ပါသည်။ ထို့အပြင် လေဖိအား actuator ၏ ပွတ်တိုက်မှု ထိတွေ့ မျက်နှာပြင်ကို elastomer သို့မဟုတ် polymer ဖြင့် ပြုလုပ်ထားပြီး ဟောင်းနွမ်းနေသော O-ring များနှင့် ပလတ်စတစ် လမ်းညွှန် အစိတ်အပိုင်းများကို အစားထိုးရန် လွယ်ကူပါသည်။
လျှပ်စစ် actuator တစ်ခုအနေဖြင့် မော်တာမှ output shaft သို့ reduction gearbox တစ်ခုရှိလေ့ရှိသည်။ တစ်ခုနှင့်တစ်ခု ပေါင်းစပ်ထားသော ဂီယာများစွာရှိပြီး လည်ပတ်နေစဉ်အတွင်း ဟောင်းနွမ်းသွားမည်ဖြစ်သည်။ pneumatic actuator ၏ သက်တမ်းတစ်လျှောက်လုံးတွင် lubricating grease ကို ပြောင်းလဲရန် မလိုအပ်ကြောင်းလည်း သတိပြုသင့်သည်။
လိမ်အား
ပိုက်လိုင်းအဆို့ရှင် actuator များ၏ အရေးကြီးဆုံးစွမ်းဆောင်ရည် parameter များထဲမှတစ်ခုမှာ torque ဖြစ်သည်။ electric actuator ၏ torque သည် ဒီဇိုင်း (constant component) နှင့် stator သို့ ပေးသော voltage ပေါ်တွင် မူတည်သည်။ pneumatic actuator ၏ torque သည် ဒီဇိုင်း (constant component) နှင့် pneumatic actuator သို့ ထောက်ပံ့ပေးသော လေထောက်ပံ့မှု၏ ဖိအားပေါ်တွင် မူတည်သည်။
ယေဘုယျအားဖြင့် actuator ၏ torque သည် valve ၏ အများဆုံး torque ထက် ပိုများရမည် သို့မဟုတ် shutoff element ကို ရွှေ့ရန် လိုအပ်သော torque ထက် ပိုများရမည်။ အမှန်တကယ်အသုံးပြုရာတွင် valve ၏ အမှန်တကယ် torque သည် ထုတ်လုပ်သူ၏ ကုန်အမှတ်တံဆိပ်မှ ဖော်ပြထားသော အများဆုံး torque ထက် ပိုများနိုင်ပြီး actuator ၏ အများဆုံး torque ထက်လည်း ပိုများနိုင်သည်။ ၎င်းသည် အရေးပေါ်အခြေအနေတစ်ခုဖြစ်ကြောင်း သံသယဖြစ်စရာမလိုပါ။
actuator ကို ဆက်လက်လည်ပတ်နေပါက actuator နှင့် valve ကို ပျက်စီးစေနိုင်သည်။ valve ၏ torque တိုးလာပါက မော်တာသည် pull-out value (pull-out value) သို့ရောက်ရှိသည်အထိ torque ကို တဖြည်းဖြည်းတိုးမြှင့်ပေးမည်ဖြစ်သည်။ ဆိုလိုသည်မှာ စက်ပိုင်းဆိုင်ရာဖွဲ့စည်းပုံသည် ဒီဇိုင်းအတိုင်းအတာထက်ကျော်လွန်၍ အလွန်အကျွံ torque ကို ခံနိုင်ရည်ရှိရန် အတင်းအကျပ်ခိုင်းစေခံရသည်။
လှည့်ပတ်မှုလွန်ကဲမှုကာကွယ်မှု
အထက်ဖော်ပြပါအခြေအနေများတွင် ပစ္စည်းကိရိယာများ ပျက်စီးခြင်းမှ ကာကွယ်ရန်အတွက် လျှပ်စစ် actuator ကို အထူးကိရိယာများ တပ်ဆင်ထားနိုင်သည်။ အသုံးအများဆုံးမှာ torque switch ဖြစ်ပြီး စက်ပိုင်းဆိုင်ရာဖြစ်နိုင်သည် (အသုံးများသောအလုပ်လုပ်ပုံမှာ worm gear သည် over-torque အခြေအနေတွင် linearly ရွေ့လျားသည်)။ ၎င်းသည် electronic လည်းဖြစ်နိုင်သည် (အသုံးများသောအခြေခံမှာ stator current သို့မဟုတ် Hall effect ကိုတိုင်းတာရန်ဖြစ်သည်။)။ torque သည် ဒီဇိုင်းထုတ်ထားသော အမြင့်ဆုံးတန်ဖိုးထက် ကျော်လွန်သွားသောအခါ torque switch သည် stator ၏ voltage ကို ဖြတ်တောက်ပြီး actuator မော်တာကို ရပ်တန့်နိုင်သည်။ pneumatic actuator များတွင် over-torque protection မလိုအပ်ပါ။ valve သို့ torque သည် သတ်မှတ်ထားသော ကန့်သတ်ချက်ထက် ကျော်လွန်ပါက compressed air ၏ physical properties များကြောင့် pneumatic actuator သည် မောင်းနှင်မှုရပ်တန့်သွားမည်ဖြစ်သည်။ electric actuator များနှင့်မတူဘဲ pneumatic actuator များ၏ output torque သည် ဒီဇိုင်းကန့်သတ်ချက်ထက် မကျော်လွန်ပါ။ pipeline valve တွင် pneumatic actuator တပ်ဆင်ထားပါက သတ်မှတ်ထားသော တန်ဖိုးထက် ကျော်လွန်သော torque ကြောင့် ပစ္စည်းကိရိယာများ ပျက်စီးမှုအန္တရာယ်ကို ဖယ်ရှားပေးသည်ဟု ယူဆနိုင်သည်။
ပေါက်ကွဲမှုဒဏ်ခံနိုင်သော ဒီဇိုင်း
အသုံးပြုသည့်ပတ်ဝန်းကျင်တွင် အန္တရာယ်ရှိသောပစ္စည်းများရှိပါက လျှပ်စစ်ပစ္စည်းများသည် ပေါက်ကွဲမှုဖြစ်စေနိုင်သည်။ အန္တရာယ်ရှိသောပတ်ဝန်းကျင်တွင် ကာကွယ်မှုအဆင့်များနှင့် ကာကွယ်မှုနည်းလမ်းများနှင့်ပတ်သက်၍ နေရာကန့်သတ်ချက်များကြောင့် ဤဆောင်းပါးတွင် မပါဝင်ပါ။
သို့တိုင် အန္တရာယ်ရှိသောပစ္စည်းများပါရှိသောပတ်ဝန်းကျင်များတွင် ပေါက်ကွဲမှုဒဏ်ခံနိုင်သောပစ္စည်းများကို အသုံးပြုရမည်ဖြစ်ကြောင်း အလေးပေးပြောကြားရန် လိုအပ်နေဆဲဖြစ်သည်။
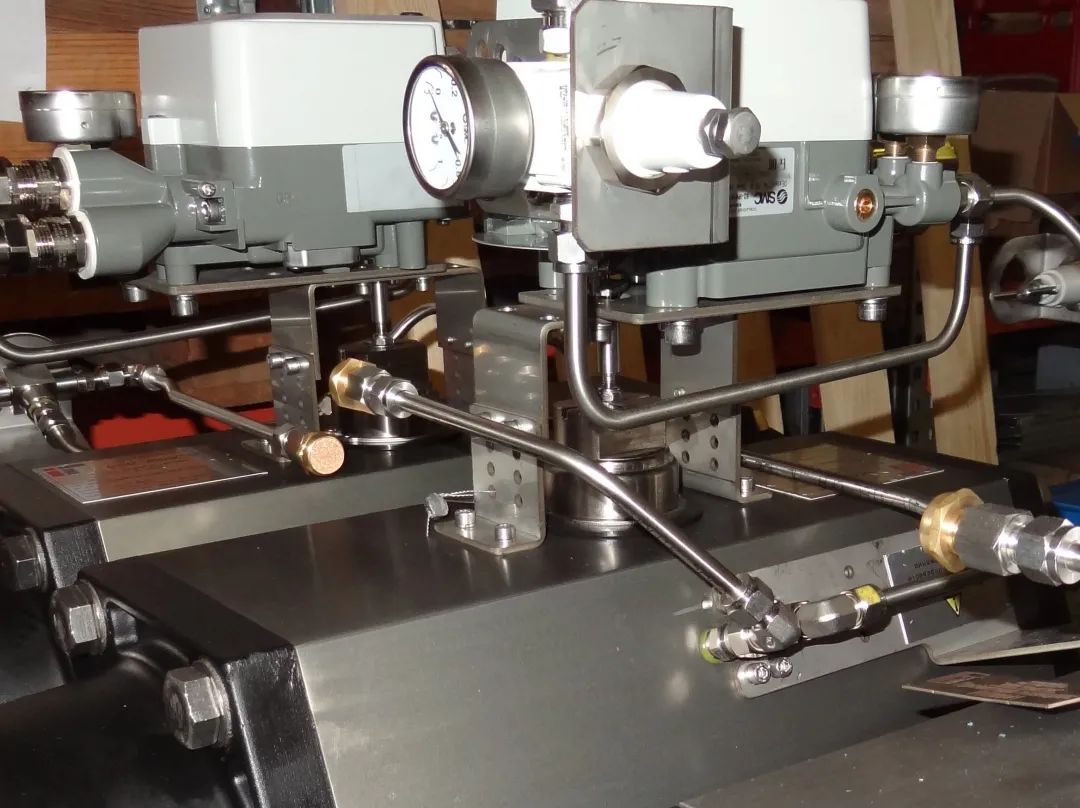
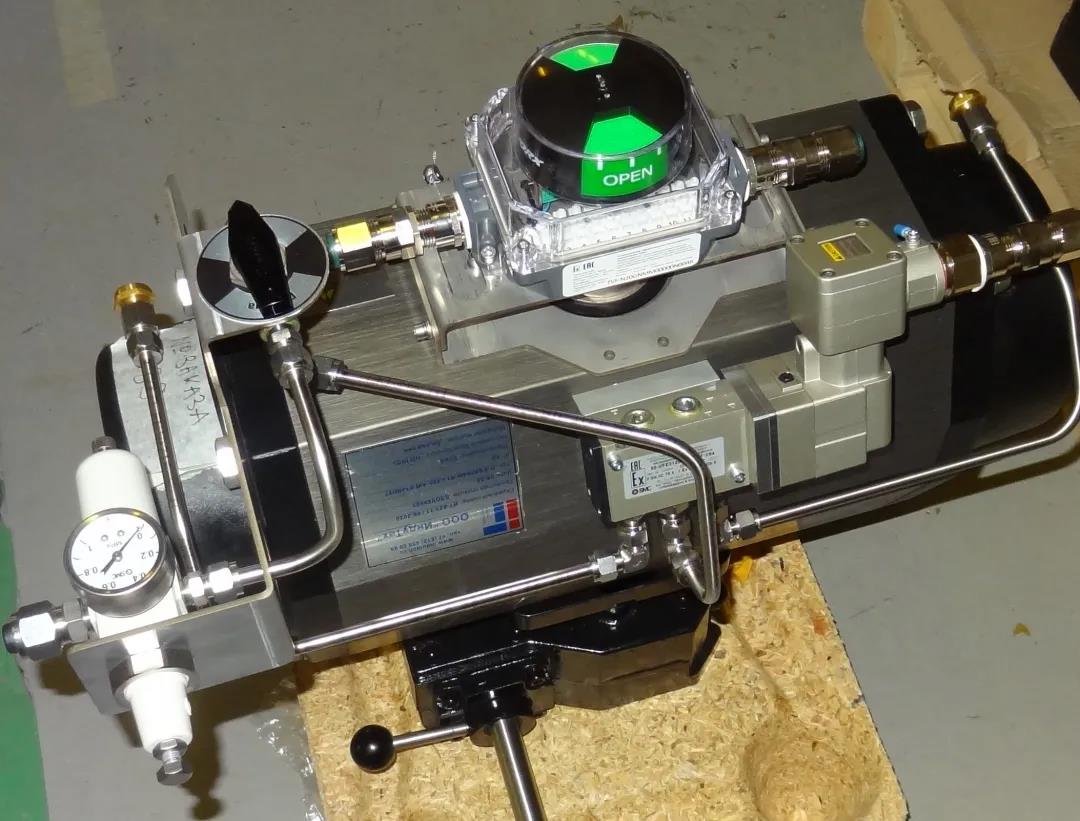
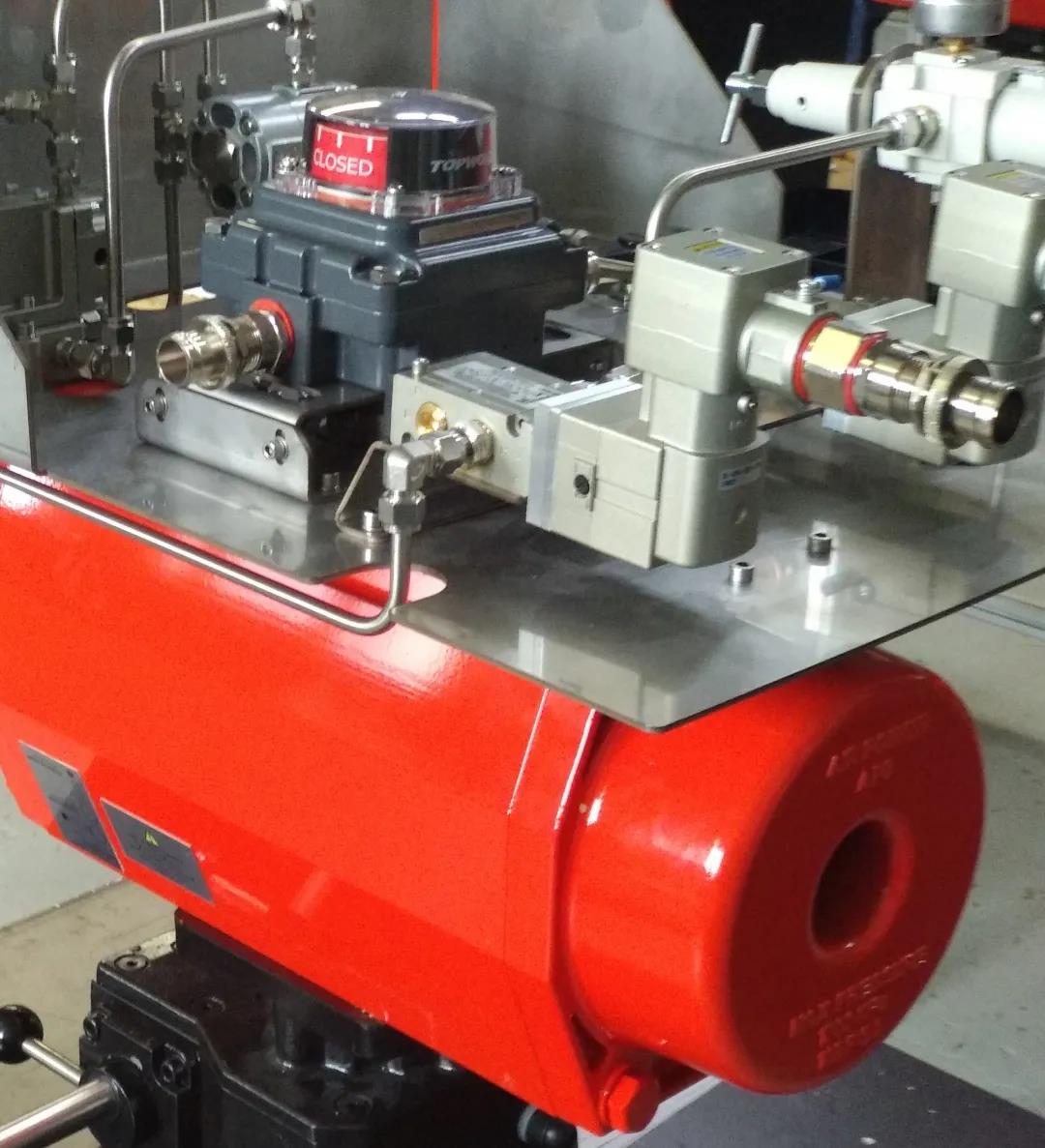
ရိုးရာစက်မှုလုပ်ငန်းစံနှုန်းလျှပ်စစ် actuator များနှင့်နှိုင်းယှဉ်ပါက ပိုက်လိုင်းအဆို့ရှင်များအတွက် ပေါက်ကွဲမှုဒဏ်ခံနိုင်သော လျှပ်စစ် actuator များသည် ပိုမိုစျေးကြီးပြီး ဒီဇိုင်းတွင် ပိုမိုရှုပ်ထွေးပါသည်။ pneumatic actuator ကို အန္တရာယ်ရှိသောပတ်ဝန်းကျင်တွင် အသုံးပြုသည့်တိုင် ပေါက်ကွဲမှုအန္တရာယ်မရှိပါ။ pneumatic actuator များအတွက် အန္တရာယ်ရှိသောပတ်ဝန်းကျင်အတွက် အထူးဒီဇိုင်းသည် positioner များ၊ solenoid valve များနှင့် limit switch များသာဖြစ်သည် (ပုံ ၁-၃)။ အလားတူပင်၊ ပေါက်ကွဲမှုဒဏ်ခံနိုင်သော ဆက်စပ်ပစ္စည်းပါရှိသော pneumatic actuator ကို ပိုက်လိုင်းအဆို့ရှင်ကို လည်ပတ်ရန် အသုံးပြုပါက တူညီသောလုပ်ဆောင်ချက်ရှိသော ပေါက်ကွဲမှုဒဏ်ခံနိုင်သော လျှပ်စစ် actuator ထက် ကုန်ကျစရိတ်မှာ သိသိသာသာ နည်းပါးမည်ဖြစ်သည်။
နေရာချထားခြင်း
လေဖိအားသုံး actuator များတွင် အရေးအကြီးဆုံး ချို့ယွင်းချက်များထဲမှ တစ်ခုဖြစ်သည်။ actuator သည် stroke ၏ အလယ်သို့ ရောက်ရှိသောအခါ၊ နေရာချထားမှုသည် ပိုမိုရှုပ်ထွေးလာပြီး၊ ဆိုလိုသည်မှာ control valve ၏ spool ကို နေရာချထားခြင်းသည် ပိုမိုခက်ခဲသည်။
လေရဲ့ ရုပ်ပိုင်းဆိုင်ရာ ဝိသေသလက္ခဏာတွေကြောင့် pneumatic actuator တွေရဲ့ positioning accuracy ဟာ electric actuator တွေထက် အဆပေါင်းများစွာ နိမ့်ကျပါတယ်။ electric actuator က stepping motor ကို အသုံးပြုမယ်ဆိုရင် positioning accuracy ဟာ positioner တပ်ဆင်ထားတဲ့ pneumatic actuator ထက် အဆပေါင်းများစွာ မြင့်မားပါတယ်။ နောက်ဆုံးတစ်ခုကို positioning accuracy ဒါမှမဟုတ် control accuracy မြင့်မားစွာ မလိုအပ်တဲ့ စနစ်တွေအတွက်သာ အသုံးပြုနိုင်ပါတယ်။ pipeline valve တွေမှာ အသုံးပြုတဲ့ pneumatic actuator တွေရဲ့ structural design မှာ ကိုယ်ပိုင်ဝိသေသလက္ခဏာတွေ ရှိပါတယ်- control system ရဲ့ components အားလုံးကို actuator ရဲ့ အပြင်ဘက် မျက်နှာပြင် ဒါမှမဟုတ် main structure ရဲ့ အပြင်ဘက်မှာ တပ်ဆင်ထားပါတယ်။ operating mode ကို off ကနေ control ကို ပြောင်းဖို့ လိုအပ်ရင် solenoid valve ကို positioner နဲ့ အစားထိုးဖို့ လိုအပ်ပါတယ်။ ဒီ components နှစ်ခုကို pneumatic actuator ရဲ့ အပြင်ဘက်မှာ တပ်ဆင်ထားပြီး mating surface ရဲ့ design ကလည်း အတူတူပဲဖြစ်တဲ့အတွက် distributor ကို ဖယ်ရှားပြီး positioner ကို တပ်ဆင်တာက ပိုအဆင်ပြေပါတယ်။ တစ်နည်းအားဖြင့် သက်ဆိုင်ရာ accessories တွေကို အစားထိုးခြင်းအားဖြင့် shutdown နဲ့ control နှစ်မျိုးလုံးအတွက် pneumatic actuator တစ်ခုတည်းကို အသုံးပြုနိုင်ပါတယ် (ပုံ ၁-၂)။
ပို့စ်တင်ချိန်: ၂၀၂၁ ခုနှစ်၊ မေလ ၁၀ ရက်